commit
8e4fc4b52b
44
README.md
44
README.md
|
|
@ -1,4 +1,5 @@
|
|||
# 3D Machine Learning
|
||||
3D Machine Learning
|
||||
|
||||
In recent years, tremendous amount of progress is being made in the field of 3D Machine Learning, which is an interdisciplinary field that fuses computer vision, computer graphics and machine learning. This repo is derived from my study notes and will be used as a place for triaging new research papers.
|
||||
|
||||
I'll use the following icons to differentiate 3D representations:
|
||||
|
|
@ -78,6 +79,7 @@ To see a survey of RGBD datasets, check out Michael Firman's [collection](http:/
|
|||
|
||||
<b>PASCAL3D+ (2014)</b> [[Link]](http://cvgl.stanford.edu/projects/pascal3d.html)
|
||||
<br>12 categories, on average 3k+ objects per category, for 3D object detection and pose estimation.
|
||||
|
||||
<p align="center"><img width="50%" src="http://cvgl.stanford.edu/projects/pascal3d+/pascal3d.png" /></p>
|
||||
|
||||
<b>ModelNet (2015)</b> [[Link]](http://modelnet.cs.princeton.edu/#)
|
||||
|
|
@ -176,6 +178,7 @@ This work introduce ScanObjectNN, a new real-world point cloud object dataset ba
|
|||
|
||||
<b>AI2-THOR: Photorealistic Interactive Environments for AI Agents</b> [[Link]](http://ai2thor.allenai.org/)
|
||||
<br>AI2-THOR is a photo-realistic interactable framework for AI agents. There are a total 120 scenes in version 1.0 of the THOR environment covering four different room categories: kitchens, living rooms, bedrooms, and bathrooms. Each room has a number of actionable objects.
|
||||
|
||||
<p align="center"><img width="50%" src="https://github.com/timzhang642/3D-Machine-Learning/blob/master/imgs/AI2-Thor.jpeg" /></p>
|
||||
|
||||
<b>UnrealCV: Virtual Worlds for Computer Vision (2017)</b> [[Link]](http://unrealcv.org/)[[Paper]](http://www.idm.pku.edu.cn/staff/wangyizhou/papers/ACMMM2017_UnrealCV.pdf)
|
||||
|
|
@ -362,6 +365,7 @@ This work introduce ScanObjectNN, a new real-world point cloud object dataset ba
|
|||
<p align="center"><img width="50%" src="http://3dvision.princeton.edu/slide/DSS.jpg" /></p>
|
||||
|
||||
<b>Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients (2016)</b> [[CVPR '16 Paper]](https://www.cv-foundation.org/openaccess/content_cvpr_2016/papers/Ren_Three-Dimensional_Object_Detection_CVPR_2016_paper.pdf) [[CVPR '18 Paper]](http://openaccess.thecvf.com/content_cvpr_2018/papers/Ren_3D_Object_Detection_CVPR_2018_paper.pdf) [[T-PAMI '19 Paper]](https://arxiv.org/pdf/1906.04725)
|
||||
|
||||
<p align="center"><img width="50%" src="https://github.com/luvegood/3D-Machine-Learning/blob/master/imgs/Three-Dimensional%20Object%20Detection%20and%20Layout%20Prediction%20using%20Clouds%20of%20Oriented%20Gradients.png" /></p>
|
||||
|
||||
<b>DeepContext: Context-Encoding Neural Pathways for 3D Holistic Scene Understanding (2016)</b> [[Paper]](http://deepcontext.cs.princeton.edu/)
|
||||
|
|
@ -467,7 +471,7 @@ We propose pointwise convolution that performs on-the-fly voxelization for learn
|
|||
<br>
|
||||
We propose an efficient yet robust technique for on-the-fly dense reconstruction and semantic segmentation of 3D indoor scenes. Our method is built atop an efficient super-voxel clustering method and a conditional random field with higher-order constraints from structural and object cues, enabling progressive dense semantic segmentation without any precomputation.
|
||||
<p align="center"><img width="50%" src="https://pqhieu.github.io/media/images/wacv19/thumbnail.gif" /></p>
|
||||
|
||||
|
||||
|
||||
:game_die: <b>JSIS3D: Joint Semantic-Instance Segmentation of 3D Point Clouds (CVPR 2019)</b> [[Link]](https://pqhieu.github.io/research/jsis3d/)
|
||||
<br>
|
||||
|
|
@ -492,7 +496,7 @@ We introduce a novel convolution operator for point clouds that achieves rotatio
|
|||
|
||||
<a name="3d_synthesis_model_based" />
|
||||
|
||||
_Parametric Morphable Model-based methods_
|
||||
### Parametric Morphable Model-based methods
|
||||
|
||||
<b>A Morphable Model For The Synthesis Of 3D Faces (1999)</b> [[Paper]](http://gravis.dmi.unibas.ch/publications/Sigg99/morphmod2.pdf)[[Code]](https://github.com/MichaelMure/3DMM)
|
||||
<p align="center"><img width="40%" src="http://mblogthumb3.phinf.naver.net/MjAxNzAzMTdfMjcz/MDAxNDg5NzE3MzU0ODI3.9lQioLxwoGmtoIVXX9sbVOzhezoqgKMKiTovBnbUFN0g.sXN5tG4Kohgk7OJEtPnux-mv7OAoXVxxCyo3SGZMc6Yg.PNG.atelierjpro/031717_0222_DataDrivenS4.png?type=w420" /></p>
|
||||
|
|
@ -503,9 +507,11 @@ The code demonstrates how to 1) reconstruct textured 3D faces from images, 2) fi
|
|||
<p align="center"> <img width="50%" src="https://github.com/TimoBolkart/TF_FLAME/blob/master/gifs/model_variations.gif"></p>
|
||||
|
||||
<b>The Space of Human Body Shapes: Reconstruction and Parameterization from Range Scans (2003)</b> [[Paper]](http://grail.cs.washington.edu/projects/digital-human/pub/allen03space-submit.pdf)
|
||||
|
||||
<p align="center"><img width="50%" src="https://ai2-s2-public.s3.amazonaws.com/figures/2016-11-08/46d39b0e21ae956e4bcb7a789f92be480d45ee12/7-Figure10-1.png" /></p>
|
||||
|
||||
<b>SMPL-X: Expressive Body Capture: 3D Hands, Face, and Body from a Single Image (2019)</b> [[Paper]](https://ps.is.tuebingen.mpg.de/uploads_file/attachment/attachment/497/SMPL-X.pdf)[[Video]](https://youtu.be/XyXIEmapWkw)[[Code]](https://github.com/vchoutas/smplify-x)
|
||||
|
||||
<p align="center"> <img width="50%" src="https://github.com/vchoutas/smplify-x/blob/master/images/teaser_fig.png"></p>
|
||||
|
||||
<b>PIFuHD: Multi-Level Pixel Aligned Implicit Function for High-Resolution 3D Human Digitization (CVPR 2020)</b> [[Paper]](https://arxiv.org/pdf/2004.00452.pdf)[[Video]](https://www.youtube.com/watch?v=uEDqCxvF5yc&feature=youtu.be)[[Code]](https://github.com/facebookresearch/pifuhd)
|
||||
|
|
@ -549,9 +555,10 @@ Dense 3D Reconstructions from a Single Image (2017)</b> [[Paper]](http://ci2cv.n
|
|||
|
||||
<a name="3d_synthesis_template_based" />
|
||||
|
||||
_Part-based Template Learning methods_
|
||||
### Part-based Template Learning methods
|
||||
|
||||
<b>Modeling by Example (2004)</b> [[Paper]](http://www.cs.princeton.edu/~funk/sig04a.pdf)
|
||||
|
||||
<p align="center"><img width="20%" src="http://gfx.cs.princeton.edu/pubs/Funkhouser_2004_MBE/chair.jpg" /></p>
|
||||
|
||||
<b>Model Composition from Interchangeable Components (2007)</b> [[Paper]](http://www.cs.princeton.edu/courses/archive/spring11/cos598A/pdfs/Kraevoy07.pdf)
|
||||
|
|
@ -598,7 +605,7 @@ _Part-based Template Learning methods_
|
|||
|
||||
<a name="3d_synthesis_dl_based" />
|
||||
|
||||
_Deep Learning Methods_
|
||||
### Deep Learning Methods
|
||||
|
||||
:camera: <b>Learning to Generate Chairs, Tables and Cars with Convolutional Networks (2014)</b> [[Paper]](https://arxiv.org/pdf/1411.5928.pdf)
|
||||
<p align="center"><img width="50%" src="https://zo7.github.io/img/2016-09-25-generating-faces/chairs-model.png" /></p>
|
||||
|
|
@ -726,7 +733,14 @@ _Deep Learning Methods_
|
|||
:pill: <b>ComplementMe: Weakly-Supervised Component Suggestions for 3D Modeling (2017)</b> [[Paper]](https://arxiv.org/pdf/1708.01841.pdf)
|
||||
<p align="center"><img width="50%" src="https://mhsung.github.io/assets/images/complement-me/figure_2.png" /></p>
|
||||
|
||||
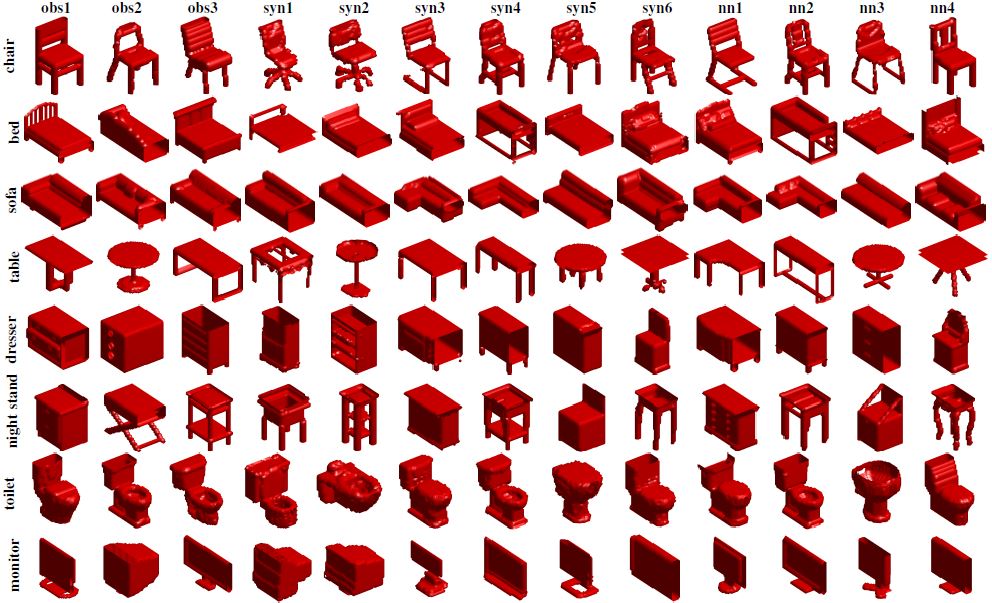
:space_invader: <b>Learning Descriptor Networks for 3D Shape Synthesis and Analysis (2018 CVPR)</b> [[Project]](http://www.stat.ucla.edu/~jxie/3DEBM/) [[Paper]](http://www.stat.ucla.edu/~jxie/3DDescriptorNet/3DDescriptorNet_file/doc/3DDescriptorNet.pdf) [[Code](https://github.com/jianwen-xie/3DDescriptorNet)]
|
||||
|
||||
An energy-based 3D shape descriptor network is a deep energy-based model for volumetric shape patterns. The maximum likelihood training of the model follows an “analysis by synthesis” scheme and can be interpreted as a mode seeking and mode shifting process. The model can synthesize 3D shape patterns by sampling from the probability distribution via MCMC such as Langevin dynamics. Experiments demonstrate that the proposed model can generate realistic 3D shape patterns and can be useful for 3D shape analysis.
|
||||
|
||||
|
||||
|
||||
:game_die: <b>PU-Net: Point Cloud Upsampling Network (2018)</b> [[Paper]](https://arxiv.org/pdf/1801.06761.pdf) [[Code]](https://github.com/yulequan/PU-Net)
|
||||
|
||||
<p align="center"><img width="50%" src="http://appsrv.cse.cuhk.edu.hk/~lqyu/indexpics/Pu-Net.png" /></p>
|
||||
|
||||
:camera::space_invader: <b>Multi-view Consistency as Supervisory Signal for Learning Shape and Pose Prediction (2018 CVPR)</b> [[Paper]](https://shubhtuls.github.io/mvcSnP/)
|
||||
|
|
@ -840,6 +854,24 @@ Deformable Shape Completion with Graph Convolutional Autoencoders (2018 CVPR)</b
|
|||
:gem::game_die: <b>GAMesh: Guided and Augmented Meshing for Deep Point Networks (3DV 2020)</b> [[Project]](https://www.ics.uci.edu/~agarwal/GAMesh/) [[Paper]](https://arxiv.org/abs/2010.09774) [[Code]](https://github.com/nitinagarwal/GAMesh)
|
||||
<p align="center"><img width="50%" src="https://www.ics.uci.edu/~agarwal/3DV_2020.png" /></p>
|
||||
|
||||
|
||||
|
||||
:space_invader: <b>Generative VoxelNet: Learning Energy-Based Models for 3D Shape Synthesis and Analysis (2020 TPAMI)</b> [[Paper]](http://www.stat.ucla.edu/~jxie/3DEBM/3DEBM_file/doc/gVoxelNet.pdf)
|
||||
|
||||
This paper proposes a deep 3D energy-based model to represent volumetric shapes. The maximum likelihood training of the model follows an “analysis by synthesis” scheme. Experiments demonstrate that the proposed model can generate high-quality 3D shape patterns and can be useful for a wide variety of 3D shape analysis.
|
||||
|
||||

|
||||
|
||||
:game_die: <b>Generative PointNet: Deep Energy-Based Learning on Unordered Point Sets for 3D Generation, Reconstruction and Classification (2021 CVPR) </b> [[Project]](http://www.stat.ucla.edu/~jxie/GPointNet/) [[Paper]](https://arxiv.org/pdf/2004.01301.pdf) [[Code](https://github.com/fei960922/GPointNet)]
|
||||
|
||||
Generative PointNet is an energy-based model of unordered point clouds, where the energy function is parameterized by an input-permutation-invariant bottom-up neural network. The model can be trained by MCMC-based maximum likelihood learning, or a short-run MCMC toward the energy-based model as a flow-like generator for point cloud reconstruction and interpolation. The learned point cloud representation can be useful for point cloud classification.
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
<a name="material_synthesis" />
|
||||
|
||||
## Texture/Material Analysis and Synthesis
|
||||
|
|
@ -1134,4 +1166,4 @@ with Per-Pixel Ground Truth using Stochastic Grammars (2018)</b> [[Paper]](https
|
|||
|
||||
<b>PerspectiveNet: 3D Object Detection from a Single RGB Image via Perspective Points (NIPS 2019)</b> [[Paper]](https://papers.nips.cc/paper/9093-perspectivenet-3d-object-detection-from-a-single-rgb-image-via-perspective-points.pdf) <p align="center"><img width="50%" src="https://storage.googleapis.com/groundai-web-prod/media/users/user_288036/project_402358/images/x1.png" /></p>
|
||||
|
||||
<b>Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and Human Pose Estimation with Human-Object Interaction and Physical Commonsense (ICCV 2019)</b> [[Paper & Code]](https://github.com/yixchen/holistic_scene_human) <p align="center"><img width="50%" src="https://yixchen.github.io/holisticpp/file/pg.png" /></p>
|
||||
<b>Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and Human Pose Estimation with Human-Object Interaction and Physical Commonsense (ICCV 2019)</b> [[Paper & Code]](https://github.com/yixchen/holistic_scene_human) <p align="center"><img width="50%" src="https://yixchen.github.io/holisticpp/file/pg.png" /></p>
|
||||
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 167 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 48 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 137 KiB |
Loading…
Reference in New Issue